




Price: $285.99
(as of Dec 17, 2024 01:38:10 UTC – Details)

Product Description

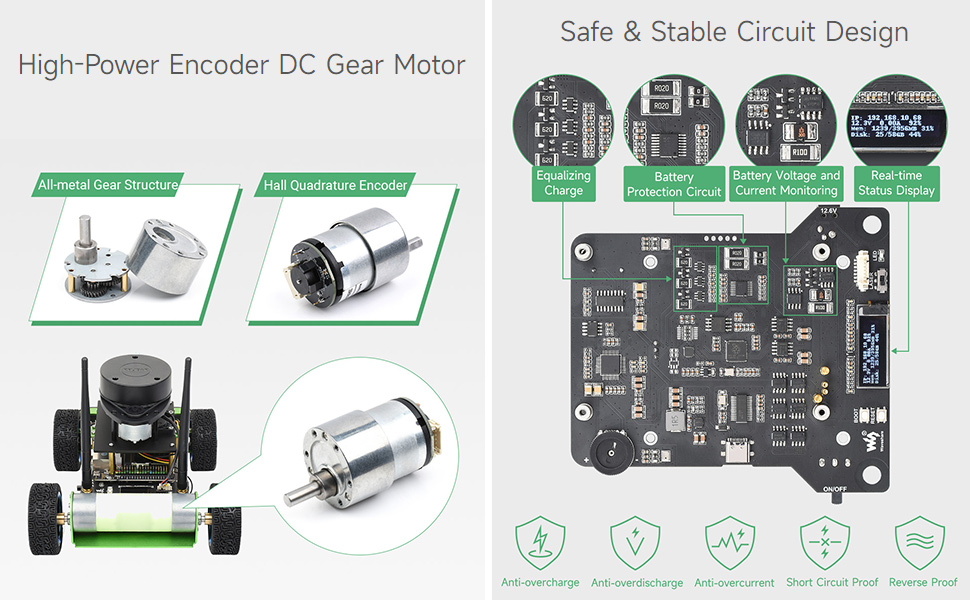
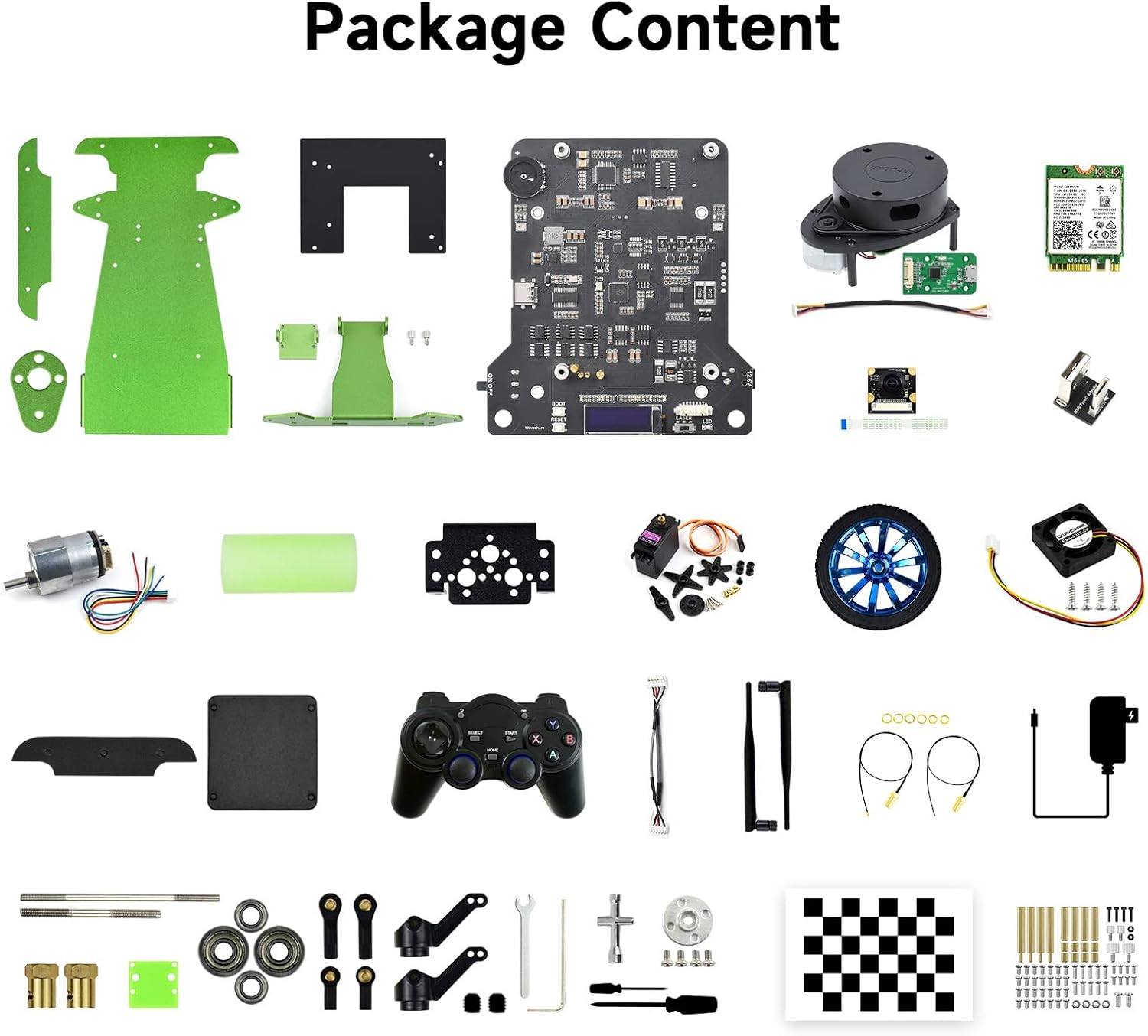
High-Quality Carbon Brushes, All-Metal Gear Structure, High Precision, Low Running Noise, 11-Wire AB-Phase Hall Speed Encoder, Support PID Closed-Loop Speed Control To Calculate Wheel Odometer Information

IMU Sensor
Built-In High-Precision 9-Axis Motion Attitude Sensor, Using Extended Kalman Filter To Merge Wheel Odometer And IMU Data, Can Produce Higher-Precision Robot Attitude

360 Degree Laser Ranging Lidar
360-Degree Scanning And Ranging Of The Surrounding Environment To Obtain A Contour Map Around The Robot

8MP 160 FOV Camera
IMX219 Sensor, 3280 × 2464Resolution Suitable For OpenCV Vision Development, Object Recognition, Target Tracking, Automatic Driving And Other AI Functions

Using USB Audio Chip
Onboard Two High-Quality MEMS Silicon Microphones And Speaker For Stereo Recording And Playback. So The Robot Also Has “Ears” And “Mouths” That Can “Listen” And “Talk”. Easily Realize Intelligent Speech Interaction
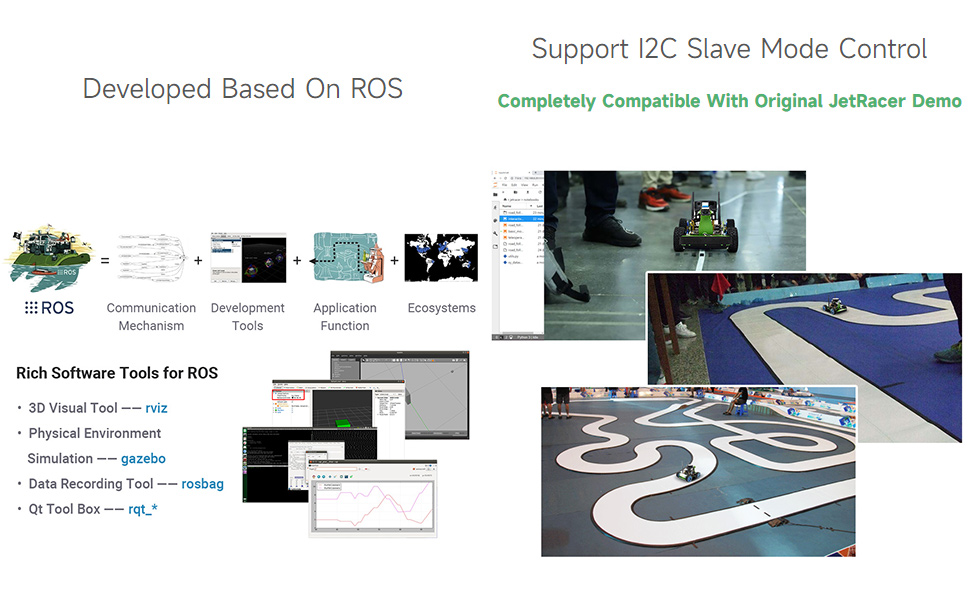
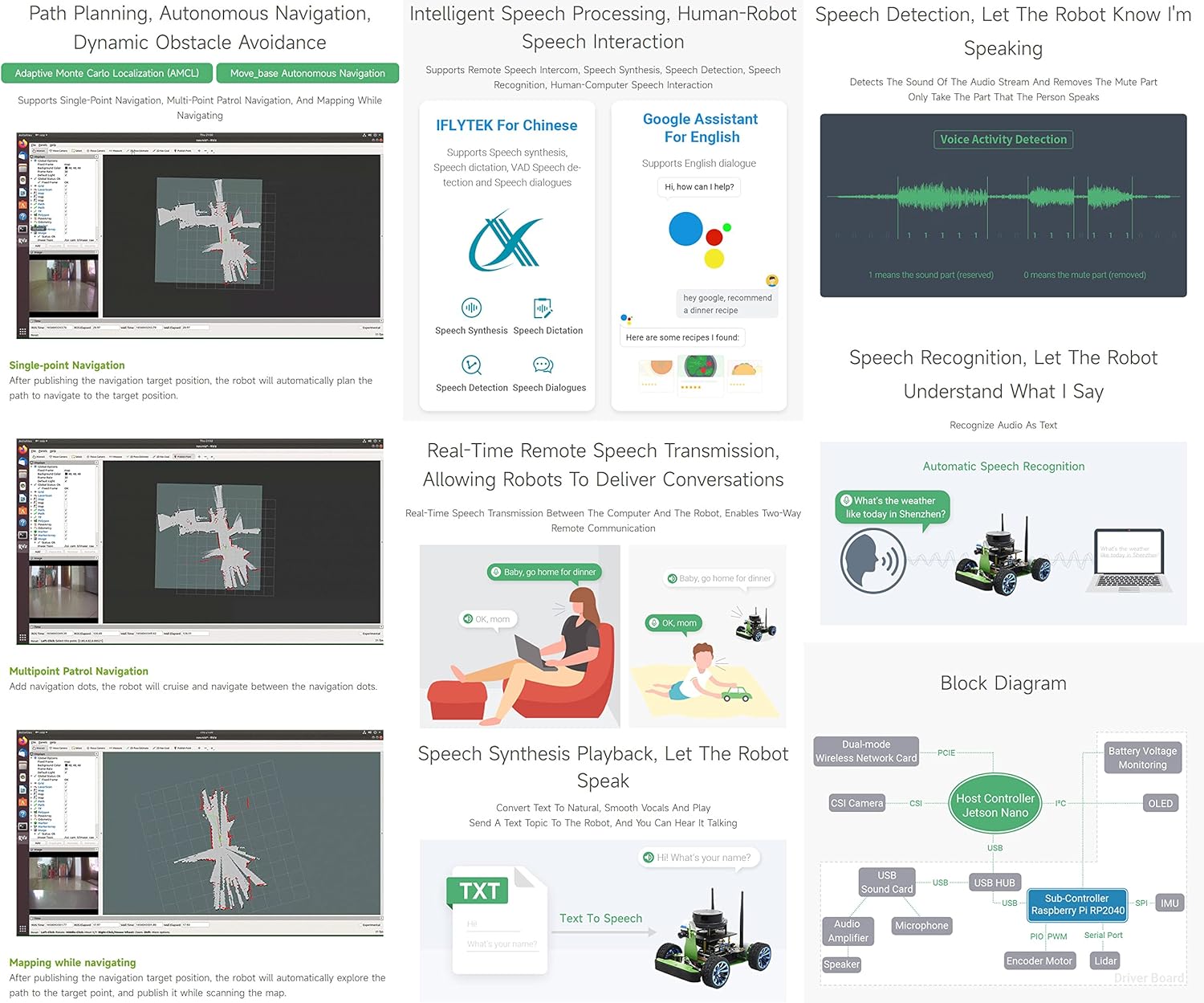
ROS (Robot Operation System) is an open-source operating system that includes a collection of software libraries and tools for robot design. It provides the services expected of an operating system, including hardware abstraction, bottom layer device control, implementation of common functions, message transfering between processes, and package management. ROS simplifies robot design and is the mainstream robot software framework in the world.
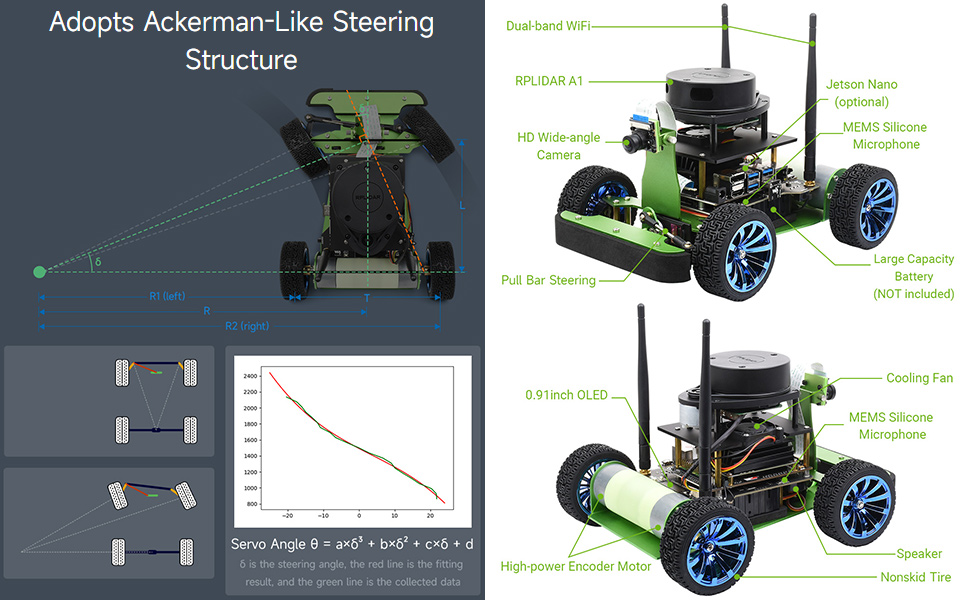
JetRacer ROS AI kit adopts an Ackerman-like steering structure with front wheels servo steering combined with rear wheels differential steering. Provides detailed kinematics model analysis, uses polynomial fitting to output steering angle, makes the steering angle more accurate.

It meets the needs of scientific research algorithm verification in various fields such as Lidar mapping, autonomous navigation, autonomous driving, intelligent speech, target detection, face recognition, etc.
It is not only compatible with software of the official JetRacer open-source project, but also is overall upgraded in hardware with better performance.
The host controller adopts Waveshare Jetson Nano Kit, which is equipped with Jetson Nano Module 16GB eMMC version, 4GB memory and has better performance.
This controller is responsible for Artificial Intelligence (AI), speech processing, visual processing, mapping and navigation, etc.
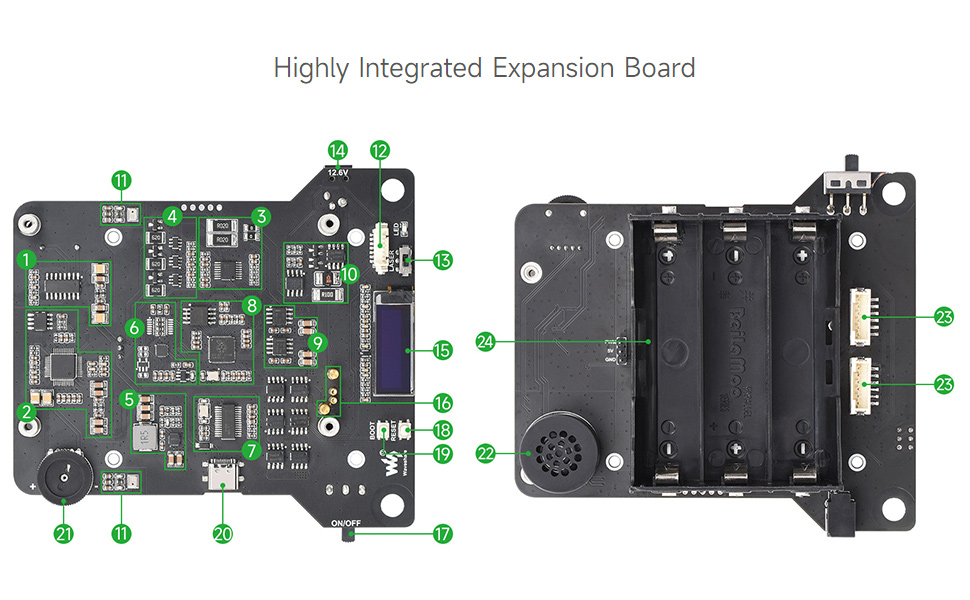
The sub-controller uses the Raspberry Pi RP2040 dual-core microcontroller, which has better real-time performance and higher control accuracy, and is responsible for attitude data collection and motion control.